Sensor system for environmental monitoring and sanitary and epidemiological surveillance
A sensor system for environmental monitoring and sanitary and epidemiological surveillance based on a mobile autonomous platform.
Task
One of the most rapidly expanding technological trends is the monitoring of environmental indicators with autonomous devices. Robots equipped with autonomous control systems, sensors, and Internet of Things (IoT) systems are employed in hazardous or remote areas, as well as for simpler tasks, such as occupational health and safety tasks in factories where the workplace climate must be maintained within acceptable limits. This is particularly pertinent in facilities where the potential for the spread of gases and substances hazardous to human health and life exists.
In order to gather data on environmental parameters within an industrial plant, an employee must traverse the site with a comprehensive array of equipment and take measurements at designated points. Nevertheless, the employee's working hours are constrained, and the potential for error cannot be entirely excluded.
In order to automate and improve the quality of monitoring, a compact autonomous vehicle was designed. The vehicle is capable of measuring microclimate parameters at the required frequencies without temporal constraints, and can navigate independently to diverse locations within the premises, including those that present accessibility challenges.
The developed hardware and software system allows for the collection of more detailed data regarding environmental monitoring of specific production zones than would be possible with manual monitoring or fixed sensors installed at particular locations. The number of microclimate measurement points required for control is 10% higher than that required by standard methods.
Solution
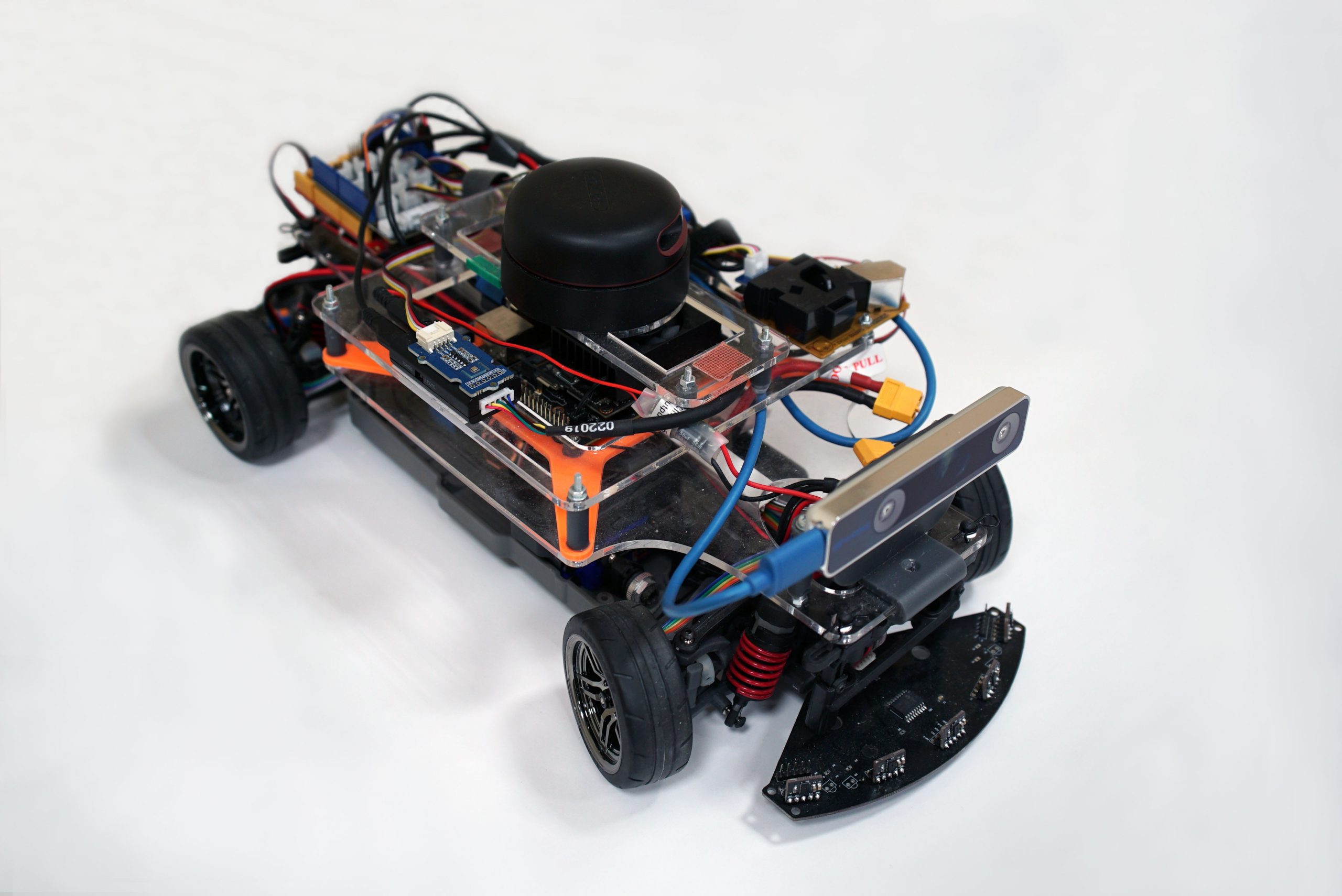
A compact autonomous device has been developed for use in production sites of up to 300 m². It is capable of navigating autonomously and of taking measurements using its climate sensors. The device's route can be configured to take sensor measurements at precisely defined points within the designated area.

The platform is capable of movement in confined spaces, with dimensions of 40×25 cm and a turning radius of less than 60 cm. The autonomous device generates a 2D map of the room utilising a combination of lidar, stereo cameras, distance sensors, and odometry sensors, while another set of sensors records temperature, humidity, barometric pressure, noise, light, and dust concentrations, as well as hazardous gas levels.
The sensor data is stored and processed within the device's internal memory.
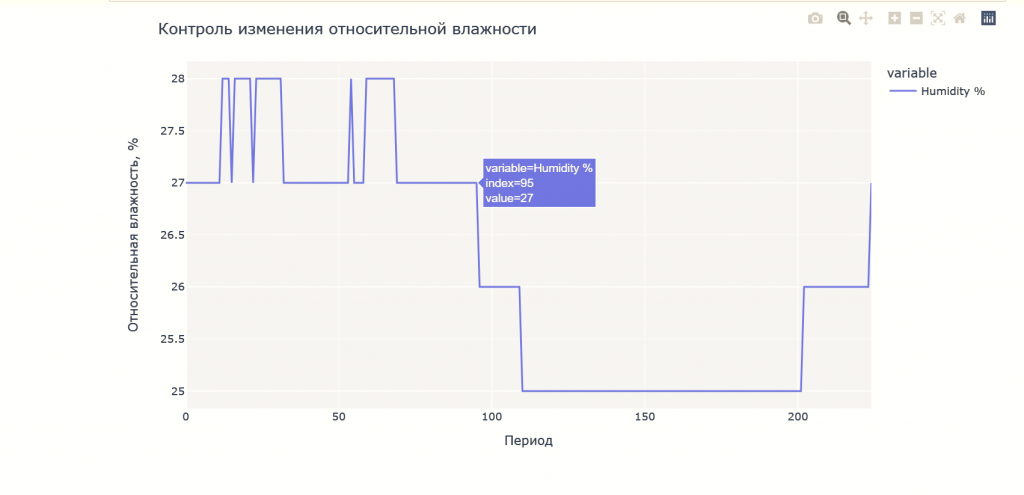
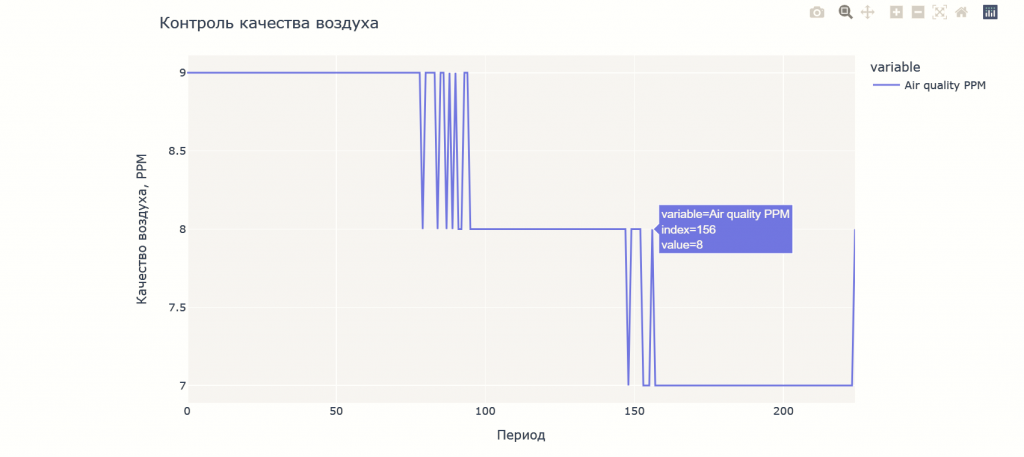
Upon completion of the route, the sensor readings associated with the coordinates of the point at which the measurements were taken can be downloaded from the device's internal memory in the form of a CSV table and a separate map file of the relevant room. The tabular data can be integrated with a map of the premises to provide a comprehensive and accurate representation of the sanitary and epidemiological conditions within the surveyed area. The data can be employed to identify potential hazards and to modify the circumstances under which individuals can remain within a defined area.
- Sensors required to enable autonomous movement of the vehicle.
The model is capable of successfully constructing 2D terrain maps and performing spatial orientation on both unfamiliar and previously constructed maps.
- Infrared distance sensors, with a total of five on the front and rear; additional sensors can be installed if necessary, with a maximum of seven
- Single-beam lidar
- Visual-SLAM camera in the front situated in the front
- Speed sensors on each of the wheels
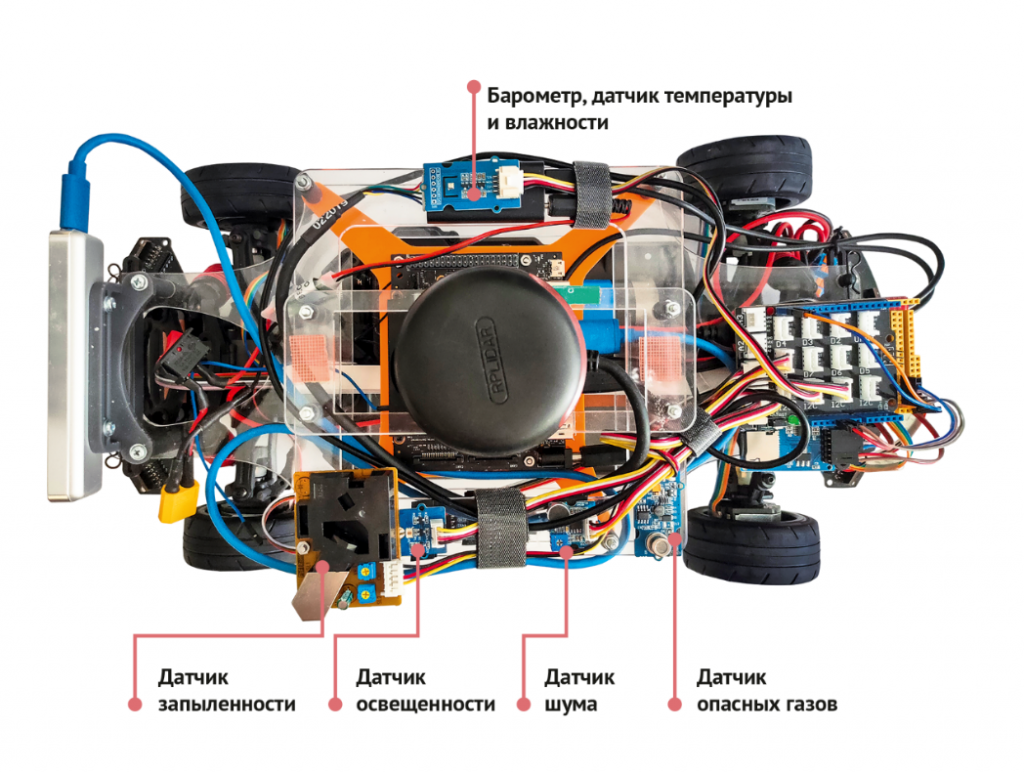
- Sensors for environmental monitoring and sanitary and epidemiological surveillance.
- Temperature
- Humidity
- Barometric pressure
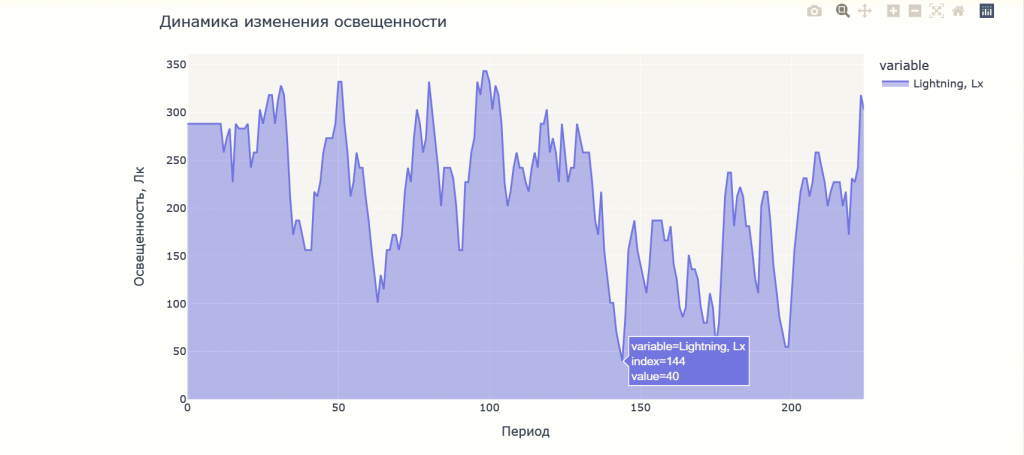
- Lux level
- Dust level
- Noise level
- Hazardous gas concentrations
The quantity and type of sensors employed for climate control can be considerably augmented when necessary. The data from these sensors is combined on the prototype board with its relative coordinates, which can then be used to identify problems in specific areas when monitoring premises.
The model's software, which facilitates its movement and data capture, was developed on the basis of ROS (Robot Operating System), i.e. on a modular basis. This allows for the software to be expanded, modernized, and customized to suit the customer's needs.
The device is capable of functioning for up to three hours in scan mode and up to ten hours in standby mode. Conventional lithium polymer batteries are employed.
Details
Scope of application
The current version of the prototype has been designed for operation within confined spaces with a maximum area of 300 m². The absence of Wi-Fi does not impede the vehicle's functionality. However, the network is essential for monitoring the device's operation and receiving feedback. In order for the model to function optimally, it is necessary to confine the space, ensuring that there are no mirrored or transparent surfaces at heights below 25 cm from the floor level, and that no obstacles smaller than 50*50 mm and lower than 35 mm are present. The maximum climb angle is 5 degrees. The maximum surmountable threshold of 7.5 mm in the current version can be increased by raising the suspension and fitting larger diameter wheels or other shock absorbers.
Wheels
The prototype's moving component was constructed using standard radio-controlled model vehicle wheels as a basis. The prototype underwent a significant upgrade during the development process with the objective of improving manoeuvrability and reducing backlash in certain parts of the wheel structure.
These dimensions are the most versatile. On the one hand, the model is able to accommodate the entire set of equipment required to fulfil its tasks. On the other hand, the compact dimensions facilitate the transportation and operation of the prototype in typical confined spaces, including small rooms, corridors, etc.
Technologies
| Programming languages and frameworks: | C++, Python, ROS, Cartographer, C, CubeMx |
| OS: | Linux |
| CVS: | Git (Gitlab) |
| IDE: | CLion, stm32cubeide, vscode |
Project team
- Project manager: Dmitriy G. Rodionov, Director of the Graduate School of of Industrial Economics at the Institute of Industrial Management, Economics and Trade of SPbPU
- Hardware and software development team leader: Georgiy S. Vasilyanov, Researcher at the Digital Modeling of Industrial Systems Laboratory, NTI Center, SPbPU
Contractors
- Graduate School of of Industrial Economics at the Institute of Industrial Management, Economics and Trade of SPbPU
- Digital Modeling of Industrial Systems Laboratory, NTI Center, SPbPU
- Industrial Systems for Streaming Data Processing Laboratory, NTI Center, SPbPU
The development was carried out as part of the ‘Ensuring connectivity and balanced spatial development of territories on the basis of smart city technologies and intelligent transport systems’ project of the SPbPU ‘Human-centred solutions and technologies’ strategic project of the ‘Priority-2030’ programme.